Chapitre 7 Mesures marégraphiques
7.1 Présentation du chapitre
Dans toute étude visant à modéliser
un phénomène physique, il est nécessaire de confronter
les sorties de modèles avec des données de terrain. Le domaine
de la marée est particulièrement bien doté en mesures
in situ. En effet, depuis plus de deux siècles maintenant, de nombreux
appareils de mesures ont été déployés le long
des côtes de locéan mondial. Ces appareils fournissent des
séries temporelles des variations du niveau de la mer qui, après
analyses, permettent dobtenir les caractéristiques des composantes
du spectre de marée à lendroit de lappareil. En outre,
depuis quelques décennies, de nouveaux types dappareils ont été
placés en zone de grands fonds afin de mesurer la marée et
pouvoir agrandir la répartition spatiale des mesures marégraphiques.
Des bases de données ont ainsi été constituées
pour mieux répondre à la demande scientifique.
Après avoir brièvement introduit
les techniques de mesures et dextraction du signal marégraphique,
nous nous proposons de présenter ces bases de données. Puis
nous introduirons deux sélections extraites de ces bases dont lune
est représentative de la marée en plein océan et lautre
de la marée en petits fonds.
7.2 Mesures marégraphiques
7.2.1 Appareils marégraphiques
Les appareils qui servent à mesurer
la marée sont les marégraphes. Cest en fait un abus
de langage car ils ne mesurent pas directement les dénivellations
issues de la marée seule. En effet, les marégraphes mesurent
les variations du niveau de la mer et cest lanalyse de ces variations
qui permet den déduire les composantes du spectre de marée
à lemplacement de lappareil. Laplace fut le premier au 18ème
siècle à mettre en place un marégraphe à Brest
durant 3 ans pour obtenir des mesures continues du niveau de la mer. Il
voulait vérifier la nouvelle théorie dynamique des marées
quil avait formulée, afin de montrer les limites de la théorie
statique de Newton [Wöppelman, 1997].
Depuis cette époque, de nombreux
types de marégraphes sont conçus. Les premiers sont de simples
échelles graduées où la hauteur de mer est lue par
un opérateur à intervalles réguliers. Puis des marégraphes
mécaniques (plus connus sous le terme de marégraphes
à flotteurs) apparaissent. Un système mécanique
plus ou moins complexe relève les montées et les descentes
dun bouchon qui flotte à la surface (et donc les variations du
niveau de la mer) sur un papier défilant à vitesse constante
sur un cylindre. Ce type dappareil permet de tracer directement sur une
feuille la courbe de marée. Cependant, pour acquérir de bonnes
mesures, le bouchon ne doit pas être perturbé par des effets
de courtes longueurs donde, comme la houle ou les vagues, et la mise en
place dun puits de tranquilisation est indispensable bien que parfois
difficile à installer. Cest pourquoi, dautres types de marégraphes
ont été construits. Les marégraphes à pression
ont un capteur de pression au fond de leau à une position référencée,
qui mesure la hauteur deau ainsi que la pression atmosphérique
au-dessus dun point de mesure immergé. Les marégraphes
acoustiques (où marégraphes à ultrason) possèdent
un émetteur acoustique de position référencée,
au-dessus de la surface de leau qui mesurent la distance à la surface
de leau grâce à une onde acoustique.
7.2.2 Extraction des composantes de
la marée
Quel que soit lappareil utilisé pour
mesurer le niveau de la mer, il faut procéder à une analyse
du signal mesuré. En effet, comme nous lavons vu dans les chapitres
précédents, cest la décomposition du potentiel générateur
de marée en fonctions sinusoïdales simples qui nous amène
à étudier la marée sous la forme dun spectre dondes.
Il faut donc faire une analyse du signal temporel de marée pour
accéder aux composantes en fréquences. Les fréquences
de la marée étant connues, lanalyse harmonique des séries
temporelles données par les mesures marégraphiques nous fournissent
donc les composantes de la marée à lendroit où est
placé le marégraphe.
7.3 Bases de données marégraphiques
7.3.1 Sélection des bases
Comme nous le verrons plus loin, notre besoin
de données in situ est important tout autant dans une optique de
comparaison de nos sorties de modèles avec les mesures de terrain,
mais aussi pour nos besoins de données à assimiler dans nos
modèles. Dans les deux cas la qualité requise pour ces données
de terrain est essentielle. Dans le cadre de notre étude, nous avons
utilisé trois banques marégraphiques :
-
la base de données WOCE ;
-
la base de données IAPSO ;
-
la base de données BHI.
7.3.2 Base de données WOCE
Cette base de données marégraphiques
a été constituée dans le cadre du World Ocean Circulation
Experiment (WOCE) qui est un projet international mettant en place des
moyens de mesures associés à des modèles numériques.
Ce programme vise à améliorer la connaissance du rôle
de la circulation océanique dans les changements du climat terrestre.
Ce projet est une composante du World Climate Research Program (WCRP).
25 pays ont contribué à la collecte de mesures in situ et
de mesures altimétriques entre 1990 et 1997 afin de caractériser
locéan mondial. Un des objectifs de ce programme a été
de constituer une base de données marégraphiques composée
de 197 données. La qualité des données est la meilleure
disponible à ce jour et les analyses des signaux marégraphiques
sont quantitativement importantes car la plupart présentent plus
dune vingtaine dondes. Nous donnons Figure 13 la répartition spatiale
des appareils de mesures constituant cette base. Les données sont
majoritairement situées dans les zones pélagiques et insulaires
du Pacifique.
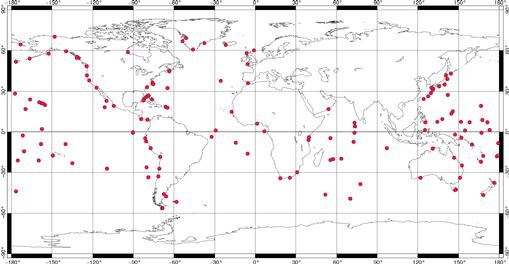
Figure 13 : Base de données
marégraphiques WOCE
7.3.3 Base de données IAPSO
La base de données IAPSO (Inter-Agency
Procurement Services Office) a été construite pour répondre
au besoin de mesures marégraphiques de plein océan. En effet,
durant de nombreuses années, les moyens techniques ne permettaient
pas de mesurer le niveau de la mer ailleurs que dans les petits fonds.
Il y a quelques décennies, les progrès en technologie dappareils
maritimes ont permis lélaboration de marégraphes à
pression de grands fonds. Posés pendant plusieurs mois sur des fonds
océaniques de plusieurs milliers de mètres, ils enregistrent
des séries temporelles (en général horaire) des variations
du niveau de la mer en plein océan. Ces données sont dune
valeur scientifique inestimable car elles ne sont pas contaminées
par les effets locaux de la topographie côtière et des petits
fonds. Elles apportent une information nouvelle aux modèles globaux
et peuvent être directement comparées aux données satellitaires.
En plein océan, les mesures altimétriques ne sont pas détériorées
par les corrections près des zones terrestres. La compilation de
348 données a été publiée en 1992 [Smithson,
1992] Pour chaque marégraphe, les huit ondes disponibles sont :
M2,
S2,
N2,
K2
, K1,
O1,
Q1 et P1.
La Figure 14 donne la répartition des marégraphes constituant
la base.
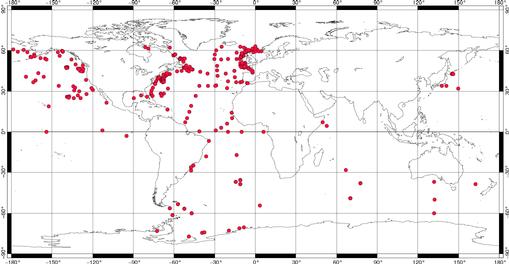
Figure 14 : Base de données
marégraphiques IAPSO
Cette base couvre principalement les zones
pélagiques de lAtlantique Nord et du Pacifique Nord. Les données
sont issues de marégraphes de fond. Elles sont potentiellement entachées
dune erreur sur la connaissance de la pression atmosphérique au
moment des mesures. En outre, ces marégraphes ne mesurent pas les
effets stériques journaliers que mesurent les marégraphes
mécaniques. Il est donc nécessaire dappliquer quelques corrections
(ou de vérifier quelles ont été appliquées)
avant dexploiter leurs données.
7.3.4 Base de données BHI
Comme nous lavons vu en introduction, de
très nombreux instruments de mesure du niveau de la mer ont été
disposés le long des côtes du global terrestre. Répondant
à un besoin premier de prédiction locale de la marée,
essentiel dans les zones de transport maritime (port, embouchure des rivières
),
ils fournissent des séries temporelles très importantes.
Cependant, la plupart du temps, la mise en place de ces marégraphes
répondait à un besoin spécifique et la qualité
de la mesure est très variable, dautant plus que certaines mesures
ont plus de deux siècles maintenant. Cependant un énorme
travail de collecte de ces données a été entrepris
par le Bureau Hydrographique International pour mettre à la disposition
des usagers une base de données marégraphiques la plus complète
possible [International Hydrographic Office, 1979]. Cette base contient
environ 4000 marégraphes le plus souvent situé en zones côtières
sur tous les océans du globe (cf. Figure 15).
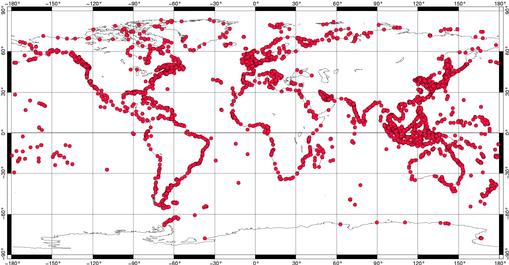
Figure 15 : Base de données
marégraphiques BHI
7.3.5 Commentaires
Les trois bases introduites précédemment
sont très différentes les unes des autres. Les données
sont donc à utiliser avec beaucoup de précaution. Les données
WOCE sont bonnes et cohérentes car issues dun même programme
international : les signaux de marée ont été analysés
de la même façon. La base de IAPSO a été construite
relativement récemment et, après quelques vérifications
(correction de la marée radiale S2
), peut être
utilisée sans problème. Par contre, la base BHI a des origines
très variées. Un gros effort danalyse et de comparaison
est donc nécessaire avant dutiliser ses données.
En outre, comme le montre les Figure 13,
Figure 14 et Figure 15, la répartition géographique des marégraphes
est très inégale. Les zones de lhémisphère
nord, riches en côtes et ayant été lobjet de programmes
plus anciens de mesures des océans, sont nettement mieux pourvues
en quantité de mesures que celles de lhémisphère
sud. En particulier, il y a peu de mesures marégraphiques dans lOcéan
Indien et dans le sud de lOcéan Pacifique. Nous devons tenir compte
de ces différences de densités spatiales dans lutilisation
des ces données marégraphiques.
7.4 Base pélagique de référence
: ST95
Avec la parution des nouveaux modèles
globaux de marée, une base de données marégraphiques
extraites de la base WOCE a été construite pour des besoins
de comparaison [Shum et al., 1997]. Les 195 données WOCE
ont été soigneusement analysées et 95 ont été
sélectionnées pour former la base ST95 [Cartwright and
Ray, 1991; Le Provost, 1994]. Afin de donner une idée
de limportance en amplitude des différentes ondes du spectre de
marée, nous avons tracé Figure 16 la décomposition
harmonique de ce spectre pour lensemble de ces 95 marégraphes.
Pour quantifier les composantes de marées
nous introduisons une Root Mean Square (RMS) égale à :
 (7.64)
(7.64)
avec :
-
N le nombre de marégraphes pris en compte ;
-
HTG lamplitude de la marée ;
-
GTG la phase de la marée référencée
par rapport au méridien de Greenwich.
Les ondes sont classées par ordre dimportance.
Léchelle des ordonnées (amplitude en centimètres)
est logarithmique.
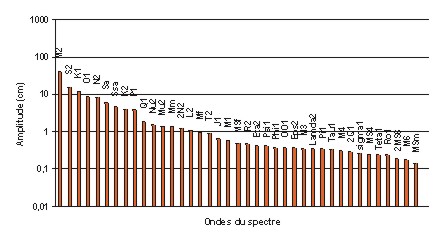
Figure 16 : Décomposition harmonique
du spectre de marée pour la base de données ST95
Cette base est représentative des
phénomènes de marées qui ont lieu en plein océan.
La répartition spatiale de cette base est donnée Figure 17.
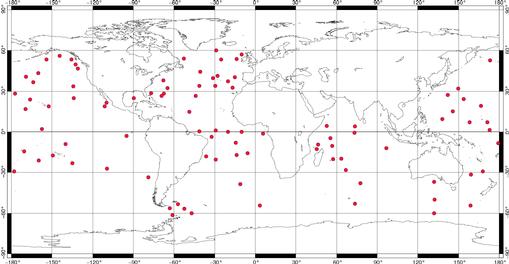
Figure 17 : Répartition spatiale
de la base de données ST95
7.5 Base côtière de référence
: ST727
7.5.1 Les besoins
Lévaluation de la qualité dun
modèle global de marée dans les zones de petits fonds est
un travail ardu, à cause de la complexité des caractéristiques
de la marée le long des côtes et sur les plateaux où
les longueurs dondes sont plus courtes. Les amplifications régionales
sont difficilement prises en compte par ce type de modèle. En effet,
les non-linéarités qui y prennent place conduisent à
un spectre de marée beaucoup plus complexe quen plein océan.
La base ST95 nest représentative que de locéan profond.
Le but de notre travail étant, en particulier, lamélioration
des modèles globaux en zones côtières nous nous devions
de construire une base de données représentative de la marée
en petits fonds afin de pouvoir comparer nos sorties de modèles.
Par extension, cette base peut devenir un outil de référence
pour comparer la qualité des modèles en zones côtières
et sur les plateaux.
Ainsi, une autre base de données
composée de 727 marégraphes tous situés en zone côtière
(ST727, [Lefèvre et al., 1999b]) a été construite
pour rendre compte des phénomènes de la marée en petits
fonds. Les données ont toutes été extraites de la
base BHI.
7.5.2 Sélection des côtes
Afin de faciliter la sélection des
marégraphes inclus dans la base BHI, nous avons les avons référencés
par rapport à leur position le long des côtes de six zones
océaniques :
-
LOcéan Atlantique ;
-
LOcéan Indien ;
-
LOcéan Pacifique ;
-
LOcéan Antarctique ;
-
Les Mers Arctiques ;
-
la Mer Méditerranée.
Afin déviter des côtes trop
longues (pas plus de 10000 km), ces océans ont été
divisés en 26 segments, permettant une meilleure visualisation de
la distribution et des propriétés régionales des caractéristiques
de la marée. De plus, ces segments ont été sectionnés
de telle manière que les caractéristiques des marées
le long des côtes soient homogènes. La distribution de ces
26 segments est donnée Figure 18. Les côtes ont été
digitalisées avec des portions droites élémentaires
de 5 à 20 km de long, ce qui permet de localiser chacun des marégraphes
suivant une abscisse curviligne.
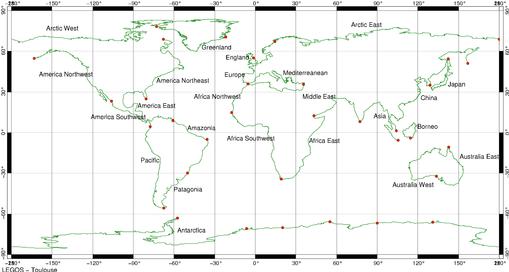
Figure 18 : Sélection des côtes
de locéan mondial
7.5.3 Construction de la base
Les 727 marégraphes de ST727 ont été
soigneusement sélectionnés parmi la base BHI grâce
à plusieurs critères présentés que nous présentons
dans la suite.
7.5.3.1 Cohérence spatiale
Plusieurs critères de sélection
spatiale ont été appliqués sur la position des marégraphes.
En premier lieu, toutes les stations situées à plus de 10
km des côtes digitalisées ont été écartées.
En second lieu, elles ont été éliminées si
elles se trouvaient :
-
dans une petite baie (de taille inférieure à lincrément
de digitalisation des côtes) ;
-
dans un estuaire ;
-
sur la côte dune île située très près
dune côte continentale ;
à
-
lembouchure dun fleuve ou dune rivière.
Cette sélection a permis dexclure
tous les marégraphes qui mesurent des effets locaux de marée
tels les résonances, les longues étales, les effets non-linéaires
extrêmes. Lappellation des stations a en général été
dune aide précieuse pour mieux les localiser.
En dernier lieu, si plusieurs marégraphes
étaient co-localisés, seul le marégraphe avec la longueur
denregistrement la plus longue était sélectionné.
En effet, plus la longueur denregistrement est longue, moins les données
analysées sont sujettes à des problèmes de séparabilité
des ondes.
7.5.3.2 Comparaison aux modèles
globaux CSR3.0 et FES94.1
Comme nous lavons vu, les données
de la base BHI sont dorigines très diverses. Les premières
mesures datent du début du 18ème siècle.
Les décompositions harmoniques des signaux ont été
calculées par de nombreux algorithmes différents et par de
nombreuses personnes différentes. Il est donc difficile de trouver
une homogénéité dans la qualité des données
de cette base. Cest pourquoi, afin de déterminer une certaine cohérence
de qualité dans les données, nous avons choisi de nous référer
à deux modèles globaux de marée océanique :
CSR3.0 [Eanes and Bettadpur, 1996] basé sur les travaux de
Casotto
[1989] et FES94.1 [Le Provost et al., 1994]. La communauté
scientifique considérait à lépoque de la construction
de ST727 que CSR3.0 était le meilleur modèle altimétrique
global de marée et FES94.1 le meilleur modèle hydrodynamique
global. Ces deux modèles sont issus de deux approches complètement
différentes. Même si CSR3.0 utilise FES94.1 comme solution
a priori, ils peuvent tous les deux être considérés
comme étant complémentaires pour donner une bonne idée
des marées modélisées le long des côtes.
Cependant, ce critère de sélection
peut paraître controversé. Est-ce que lanalyse dune station
marégraphique en désaccord avec ces modèles prouve
que la décomposition harmonique qui lui est associée est
fausse ? Ou bien, au contraire, cette comparaison prouve-t-elle que les
modèles ne sont pas bons dans la zone localisée autour du
marégraphe considéré ? La réponse nécessite
de plus amples investigations. Cest pourquoi, dans notre cas, nous avons
seulement décidé décarter les données marégraphiques
qui présentaient un écart dau moins de 20% de différence
en amplitude et de 10° en phase avec les deux modèles, exceptés
pour des zones de forte dissipation comme le plateau de Patagonie et les
Mers de Chines où les modèles globaux sont connus pour imprécis.
Cest pourquoi, nous nous sommes appuyés sur des modèles
locaux pour la Patagonie [Glorioso and Flather, 1997] et pour les
Mers de Chines [Lefèvre et al., 1999c] afin de sélectionner
les marégraphes.
7.5.3.3 Sélection des données
En appliquant les différents critères
énoncés ci-dessus, la base ST727 a été extraite
des 3985 données de la base BHI dont nous disposions. La Figure
19 montre la répartition spatiale de cette base. La distribution
est assez bonne pour considérer que les principales côtes
de locéan mondial ont bien été prises en compte.
Cependant, des îles et des zones comprenant peu de stations ne sont
pas incluses dans notre sélection, le but premier ayant été
de considérer surtout les côtes continentales.
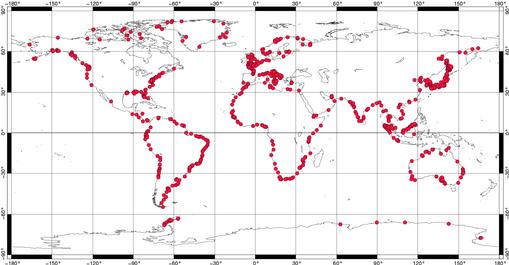
Figure 19 : Répartition spatiale
de la base de données ST727
7.5.4 Caractéristiques de
la base ST727
7.5.4.1 Décomposition harmonique
La Figure 20 présente une estimation
moyenne de lamplitude des composantes de ST727. Cest une vue globale
des caractéristiques des marées le long des côtes de
locéan mondial. Comme en plein océan, M2
et S2 restent les ondes semi-diurnes les plus importantes.
K1
et O1 sont les ondes diurnes les plus importantes. Ces
constatations dépendent de notre sélection, mais sont, malgré
tout, instructives en terme de composantes harmoniques.
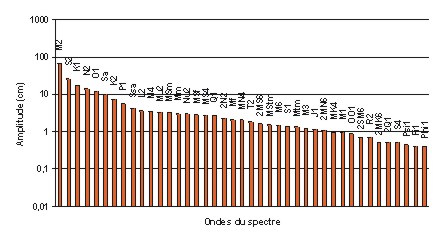
Figure 20 : Décomposition harmonique
du spectre de marée pour la base de données ST727
7.5.4.2 Marées semi-diurnes
et diurnes le long des côtes
Dimportantes différences en amplitudes
existent si nous comparons les 6 zones océaniques introduites en
7.5.2. En effet les caractéristiques topographiques et géométriques
des bassins océaniques entraînent de nombreuses disparités
dans lampleur des marées sur la surface océanique mondiale.
Nous pouvons les quantifier grâce à ST727.
Ainsi, les ondes semi-diurnes sont plus
importantes le long des côtes de lOcéan Atlantique, de lOcéan
Pacifique et de lOcéan Indien (cf. Figure 21).
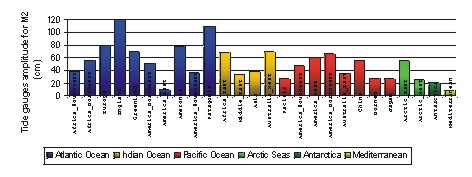
Figure 21 : Amplitude M2
pour les 26 côtes sélectionnées et leurs marégraphes
associés
La Figure 22 illustre, au contraire, que
les ondes diurnes sont plus importantes dans lOcéan Pacifique.
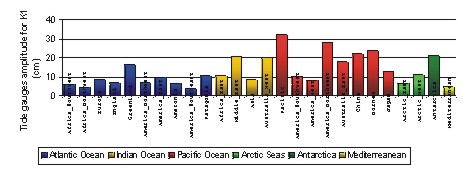
Figure 22 : Amplitude K1
pour les 26 côtes sélectionnées et leurs marégraphes
associés
7.5.5 Remarques sur ST727
7.5.5.1 Disparité spatiale
Le fait davoir construit ST727 en extrayant
des données de la base BHI entraîne une disparité spatiale
dans notre sélection. Même si la base BHI contient un nombre
très important de données marégraphiques, elle reste
inhomogène dans lespace. En effet, sil y a beaucoup de données
le long des côtes de lAtlantique et du Pacifique Nord, ailleurs,
nous pouvons constater un manque crucial de données. Cette remarque
est illustrée par la Figure 23 qui présente le nombre de
stations de la base BHI par 1000 km de côtes classées suivant
les 26 zones introduites en 7.5.2. Les zones polaires, lOcéan Indien
et le Sud du Pacifique ont très peu de données. La base BHI
est dissymétrique entre les deux hémisphères.
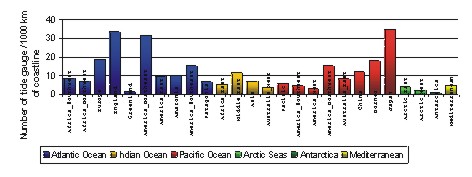
Figure 23 : Nombre de marégraphes
BHI par 1000 km de côtes
7.5.5.2 Disparité dans lanalyse
La Figure 24 présente le nombre de
composantes disponibles pour les stations de ST727. Les ondes ont été
classées suivant limportance de leur amplitude moyenne.
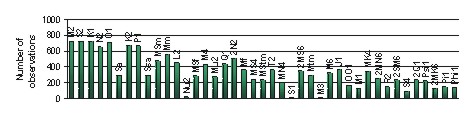
Figure 24 : Nombre de composantes fournies
par lanalyse des marégraphes de ST727
Les ondes ter-diurnes et quart-diurnes
sont nettement moins bien représentées que les ondes diurnes
et semi-diurnes bien quelles apparaissent comme étant importantes
en terme damplitude dans le spectre de marée (cf. Figure 20). Ces
ondes ne prennent des amplitudes notables que dans les petits fonds et
devraient donc apparaître dans les analyses des séries temporelles
des marégraphes de ST727. Ainsi pour compléter ce manque,
des analyses plus fines sont nécessaires. La qualité de ST727
est sûrement moins bonne pour les ondes de fréquence plus
élevées que pour celles des diurnes et semi-diurnes. En effet
la fréquence élevée de ces ondes provoque des variations
rapides de niveau de la mer qui sont plus difficilement mesurables.
7.6 Commentaires
7.6.1 Différences entre plein
océan et petits fonds
Des deux décompositions harmoniques
de ST95 et ST727, nous pouvons faire plusieurs remarques :
-
M2, S2, K1, N2,
O1,
P1
sont les ondes les plus importantes, que ce soit en grands ou en petits
fonds ;
-
en plein océan, les ondes météorologiques sont importantes
par rapport à la plupart des ondes, mais elles ne le sont pas en
petits fonds ;
-
les ondes non-linéaires des groupes des ondes quart-diurnes et sixième-diurnes
sont quasiment absentes du plein océan, alors quelles sont importantes
en petits fonds.
Il faut donc tenir compte des ondes non-linéaires
dans le spectre de marée quand nous étudions les petits fonds,
ce qui na pas encore été fait dans le cadre des modèles
globaux.
7.6.2 Qualité des bases de
comparaisons
Les deux bases de comparaisons marégraphiques
(ST95 et ST727) que nous avons introduit précédemment, sont
toutes les deux issues dune méticuleuse sélection parmi
les bases globales de données disponibles. Les origines de chacun
des marégraphes des bases globales sont variées et empêchent
de systématiser la sélection de telle ou telle de leurs données.
Le travail à entreprendre pour une sélection est donc complexe
et nest résoluble quau cas par cas. ST95 a déjà
fait ses preuves puisquelle est utilisée depuis quelques années
comme support de comparaison pour les modèles globaux de marée
par rapport à la marégraphie. ST727, dont lorigine est la
base BHI, doit en revanche continuée à être validée
et donc être utilisée avec plus de précautions.
7.7 Exemple dun réseau dobservations
: ROSAME
7.7.1 Les nouveaux réseaux
marégraphiques
Accéder à des données
marégraphiques par des bases de données est relativement
aisé. Cependant, il est difficile de connaître lorigine exacte
de ces données et donc de pouvoir estimer leur qualité. En
outre, lacquisition des séries temporelles de ces données
est ancienne. Leur acquisition était longue ce qui entraînait
après analyse une mise à disposition tardive. Cest pourquoi
depuis plusieurs années, quelques services dobservation mettent
en commun une nouvelle génération dappareils mesurant le
niveau de la mer et de nouveaux algorithmes danalyses des séries
temporelles afin de pallier les problèmes de qualité et de
délais. Lobtention de données marégraphiques répondant
au cahier des charges imposé par ces services est une tâche
ardue. Le réseau dobservations marégraphiques ROSAME (Réseau
d'Observation Sub-antarctique et Antarctique du niveau de la MEr) maintenu
par le LEGOS à Toulouse est un des réseaux participant à
cette aventure scientifique et technologique. Le site Internet http://www.omp.obs-mip.fr/omp/legos/francais/obs/rosame/index.htm
donne de plus amples informations sur ROSAME.
7.7.2 Thématique scientifique
Le niveau de la mer est un indicateur majeur
de la variabilité dynamique et thermodynamique de locéan
aux différentes échelles de temps. Aux échelles saisonnières
à interannuelles, les fluctuations climatiques sont gouvernées,
pour une très large part, par les échanges entre locéan
tropical et latmosphère. Comme le niveau moyen de la mer intègre
le champ de densité vertical, il peut ainsi être considéré
(combiné à une information sur la salinité) comme
une mesure du contenu thermique de locéan et, plus particulièrement
dans les régions tropicales, comme un index de la profondeur de
la thermocline. Son observation permet donc de déterminer et de
suivre lévolution de létat climatologique de locéan,
et didentifier les caractéristiques de la propagation d'événements
baroclines de basse fréquence, dont El Niño est lillustration
la plus spectaculaire.
Aux échelles saisonnières,
interannuelles à décennales, létat thermodynamique
de locéan est lié à la circulation océanique
globale, dans ses trois dimensions, et les gradients horizontaux du niveau
moyen de la mer donnent en surface la composante géostrophique de
cette circulation. L'observation de la topographie de l'océan et
de ses variabilités constitue donc une approche dont l'intérêt
est désormais bien établi. Sur les bords ouest des océans,
où les courants géostrophiques sont les plus intenses (Gulf
Stream, Kuro Shivo, Courant du Brésil, Courant des Aiguilles,...),
les écarts entre les niveaux instantanés et le géoïde
sont de lordre du mètre sur des distances de lordre de 100 km,
et leurs fluctuations, en particulier celles saisonnières, sont
clairement identifiables sur les enregistrements marégraphiques
et altimétriques. Il en est de même pour les tourbillons de
mésoéchelle, dont les signatures sont typiquement de la dizaine
de centimètres sur quelques centaines de kilomètres. A l'échelle
globale, la faisabilité de l'observation de la topographie de l'océan
n'était pas évidente : les pentes à mesurer sont très
faibles, de lordre de 10-6. Mais les analyses des données
altimétriques des missions TOPEX/Poseïdon et ERS1/2. ont apporté
la preuve de cette faisabilité, et les résultats démontrent
tout l'intérêt de cette observation de la topographie de l'océan,
pour identifier et aider à comprendre les mécanismes en jeu
dans la dynamique et la thermodynamique de l'océan, aux échelles
saisonnières et interannuelles.
Aux échelles séculaires,
enfin, la variation du niveau moyen des océans est reliée
aux grandes oscillations climatiques que linjection accélérée
de gaz dans latmosphère est en train de perturber, par effet de
serre. Lélévation actuelle du niveau de la mer, globalement
estimée de lordre de 15 cm à 20 cm sur ce dernier siècle,
risque de saccélérer. Létude de lévolution
à long terme du niveau de la mer vise donc à détecter
une signature de cette perturbation.
Ce paramètre est relativement "facile"
à observer in situ. D'où la mise en place à la fin
des années 1980, d'un réseau coordonné d'observation
des variations du niveau de la mer, à l'instigation de la Commission
Intergouvernementale d'Océanographie de l'UNESCO: le réseau
GLOSS (Global Sea Level Observing System). D'où aussi le développement
de l'altimétrie satellitaire. C'est dans ce contexte que le réseau
ROSAME a été implanté, comme sous-ensemble de ce réseau
mondial, et dans la perspective des programmes altimétriques satellitaires
franco-américain T/P, et européen ERS1/2.
Le réseau ROSAME répond à
quatre objectifs scientifiques principaux :
-
Une nouvelle source dinformation pour la validation et lassimilation
de données dans les modèles globaux et locaux de marée.
-
Une contribution au traitement et à la validation des mesures altimétriques
satellitales. En ce qui concerne le traitement de ces données, notre
apport concerne l'étude des marées à l'échelle
mondiale. Il est en effet impératif déliminer la contribution
des marées du signal altimétrique pour accéder aux
signatures de la circulation générale océanique, et
pour étudier la réponse régionale du niveau de la
mer aux forçages météorologiques, dans le voisinage
des sites d'implantation des stations d'observation. En ce qui concerne
la validation des mesures altimétriques satellitaires, les stations
du réseau ROSAME apportent des données de contrôle
particulièrement précieuses car elles sont situées
dans une zone où les observations in situ sont rares et difficiles,
et où les conditions météo océaniques intervenant
dans la détermination des corrections environnementales des altimètres
sont particulièrement sévères.
-
L'étude de la variabilité du courant Circumpolaire Antarctique,
par mesure directe de la pente de la surface de locéan, entre les
îles Crozet, Kerguelen et Amsterdam, et entre Hobart, Macquaries
et Dumont dUrville, en synergie avec les mesures altimétriques
satellitaires.
-
Lobservation des variations à long terme (séculaires) du
niveau de la mer dans lOcéan Indien Sud.
Mis en place dans le cadre de WOCE, ce réseau
répond maintenant aux objectifs de CLIVAR visant l'étude
des variabilités interannuelles à décennales de l'océan.
Le dernier objectif relevant par ailleurs de l'évolution séculaire
du niveau de la mer, soulignons que ce réseau est appelé
à être maintenu sur un très long terme.
7.7.3 Antériorité de
ce Service
Ce programme a débuté en 1986,
sur linitiative du Laboratoire d'Océanographique du Muséum
d'Histoire Naturelle de Paris, puis le programme a été repris
par C. Le Provost, dans le cadre de WOCE (GLOSS), avec le soutien
logistique et financier de l'IFRTP, et des crédits d'investissement
de l'IFREMER, du Ministère de la Recherche et du CNRS/INSU. L'objectif
central du programme a alors été d'installer 4 stations côtières
d'observation du niveau de la mer, à Crozet, Kerguelen, Amsterdam-StPaul
et Dumont d'Urville, équipées aux normes WOCE (i.e. avec
télétransmission par satellite). Il constitue ce qui s'appelle
désormais le réseau ROSAME.
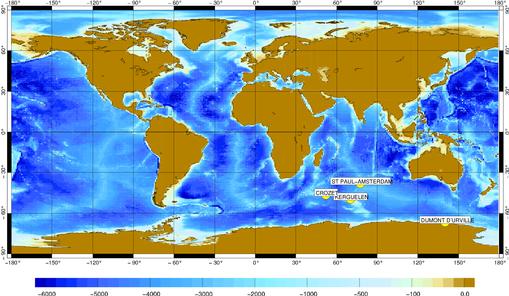
Figure 25 : Localisation des stations
du réseau ROSAME sur carte bathymétrique des fonds océaniques
(en mètres)
Les quatre stations côtières
installées sont :
-
la station de Kerguelen (1992) ;
-
la station de Saint Paul proche de lîle dAmsterdam (1994) ;
-
la station de Crozet (1994) ;
-
la station de Dumont d'Urville (1997).
Les observations sont collectées via
le système ARGOS, réceptionnées et validées
à Toulouse sur une base hebdomadaire et transmises dans un délai
de 15 jours au "Fast Delivery Center" de Hawaii.
Afin de permettre de relier les observations
faites à la côte par ces stations aux variations du niveau
de la mer au large (considérées comme index de la variabilité
des signaux océaniques), le programme d'observation par marégraphes
immergés sur les rebord des plateaux a été poursuivi
à Kerguelen jusquen 1996, et est maintenu à Amsterdam et
Crozet. Ce sont les opérations NIVMER réalisées chaque
année conjointement aux visites de maintenance des stations du Réseau
Subantarctique, avec le soutien logistique de lINSU/DT et de lIFRTP à
bord du navire Marion Dufresne II [MEOM, 1994].
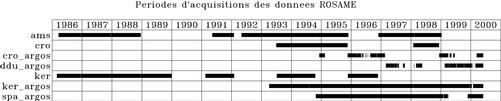
Figure 26 : Diagramme matérialisant
les périodes sur lesquelles les variations du niveau de la mer ont
été acquises (AMS, CRO et KER : stations de plateau ; CRO-ARGOS,
DDU-ARGOS, KER-ARGOS et SPA-ARGOS :stations côtières ; mise
à jour mai 2000)
7.7.4 Exploitation scientifique de
ces données
7.7.4.1 Etude des marées océaniques
Létude intensive des marées
océaniques est, dans le contexte des études climatiques,
motivée par lintérêt porté à lutilisation
de laltimétrie satellitaire comme outil dobservation synoptique
des circulations océaniques. Une meilleure connaissance de la contribution
de la marée au signal altimétrique est nécessaire,
pour pouvoir léliminer, et avoir accès au signal océanique
associé aux circulations générales et à leur
variabilité. Rappelons que, du fait de laliasing des composantes
de haute fréquence du signal sur les basses fréquences (dû
aux périodes de répétitivité des satellites
altimétriques, de lordre de 10 à 30 jours), le signal des
marées, principalement semi-diurne et diurne, contamine le signal
océanique de mésoéchelle et de basses fréquences.
L'ensemble des données acquises
dans le cadre de la composante Sea Level de WOCE a permis de valider les
modèles de marées produits ces dernières années
[Shum et al., 1997]. Rappelons que notre modèle de prédiction
des marées [Le Provost et al., 1998] a été
retenu comme lun des deux modèles recommandés pour les corrections
des mesures altimétriques satellitaires de T/P dans les zones océaniques.
Une analyse récente de toutes les données disponibles dans
la banque de Hawaii a été par ailleurs réalisée
pour définir les barres derreur sur les composantes harmoniques
de marée nécessaires pour leur utilisation dans les procédures
dassimilation [Ponchaut et al., 1999].
7.7.4.2 Validation des observations
satellitaires
Laltimétrie satellitaire est une technique
dobservation de locéan particulièrement développée
suite aux missions ERS1/2 et T/P. Doù limportance des futures
missions JASON et ENVISAT pour les programmes à venir de nature
scientifique comme CLIVAR (CLImate VARibility) où opérationnelle
comme GODAE (Global Ocean Data Assimilation Experiment). En accompagnement
de ces mesures altimétriques, la mesure in situ du niveau des océans
est indispensable :
-
pour fournir des séries temporelles, ponctuelles dans l'espace,
mais continues dans le temps, à des fins de comparaisons avec celles
obtenues par altimétrie, synoptiques dans l'espace, mais discontinues
dans le temps ;
-
pour contribuer à la validation des mesures altimétriques
;
-
pour apporter un moyen de relier entre eux des jeux de données altimétriques
venant de satellites différents, à des périodes successives.
Les opérations menées dans le
cadre de ROSAME correspondent ainsi à une contribution significative
dans ce contexte, en particulier en raison de leur situation, au sud de
l'Océan Indien. Ces données ont été comparées
aux mesures altimétriques de laltimètre T/P dans le voisinage
des sites dobservation [Cazenave et al., 1999; Yoon, 1997].
La concordance des mesures est particulièrement bonne pour le site
d'Amsterdam pour le cycle saisonnier. Elle est aussi très satisfaisante
sur le site de Crozet. Par contre, les comparaisons sur le site de Kerguelen
sont plus complexes, en raison de l'extension du plateau continental sur
cette zone. Malgré cette complexité, ce site a été
retenu comme site de référence (pour la zone Océan
Indien Sud) dans le cadre d'un réseau de 30 marégraphes (GLOSS-Alt)
inscrit au plan d'implémentation de GLOSS pour la calibration sur
le long terme des missions altimétriques satellitaires. La Figure
27 montre la position de la centrale marégraphique de Kerguelen
dans le Golfe du Morbihan et les traces T/P du satellite. Nous pouvons
voir ainsi tout lintérêt du marégraphe qui, couplé
à une balise de positionnement DORIS, permet de référencer
laltitude du satellite par rapport au niveau de la mer, de façon
très précise. En effet, le marégraphe donne un état
du niveau de la mer très fin, de lordre du centimètre.
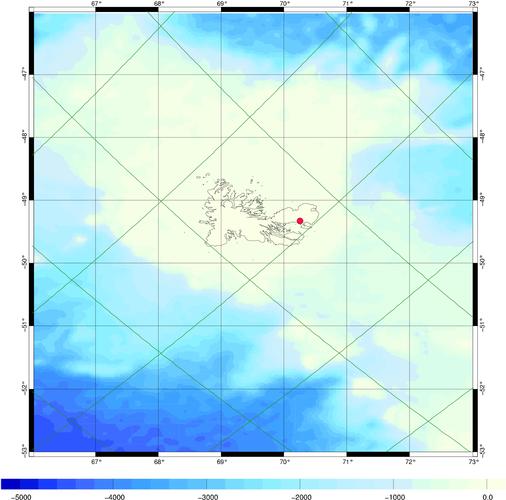
Figure 27 : Traces T/P sur Kerguelen
et marégraphe de ROSAME
7.7.4.3 Monitoring du courant circumpolaire
antarctique
Cette composante du programme scientifique
associé à ROSAME, et plus largement aux stations du réseau
mondial situées dans l'Océan Austral, vise à étudier
la faisabilité dun monitoring du courant circumpolaire Antarctique,
du passage du Drake à lentrée du Pacifique, reposant en
particulier sur les mesures in situ des variations du niveau de la mer.
La Figure 28 présente en projection polaire ce réseau. Nous
retrouvons les stations françaises dans locéan Indien et
sur lAntarctique au sud de la Tasmanie (points rouges). Les six stations
près du passage de Drake sont anglaises (points verts). La station
sur le continent Antarctique est japonaise (point bleu). Les cinq autres
stations sont australiennes (points jaunes).
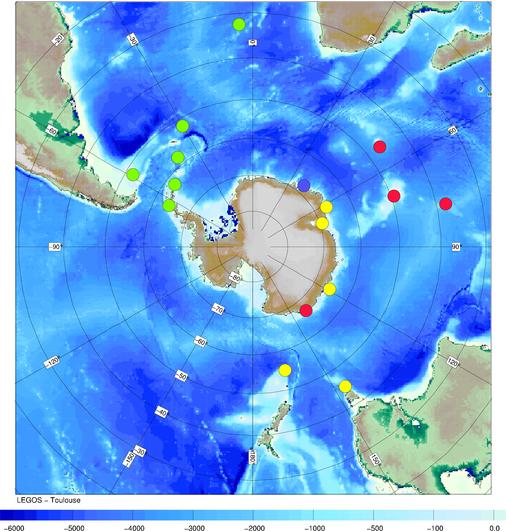
Figure 28 : Réseau Antarctique
de marégraphes de surveillance du Courant Circumpolaire Antarctique
(France en rouge, Angleterre en vert, Japon en bleu, Australie en jaune)
La contribution anglaise ACCLAIM (Antarctic
Circumpolar Current Levels for Altimetry and Island Measurements) concerne
les secteurs Drake, et Atlantique Sud Est. La contribution française
se situe sur le secteur Crozet-Kerguelen, d'une part, et sur la section
Australie-Antarctique, en coopération avec les Australiens.
L'observation continue des niveaux entre
Kerguelen et Amsterdam est menée depuis plusieurs années.
Les signatures de la variabilité des transports dans le Courant
Circumpolaire Antarctique (CCA) sont de l'ordre de 10 cm. L'analyse spectrale
de ces signaux révèle une grande variété de
pics d'énergie distribués sur tout le spectre, allant de
quelques jours à de l'interannuel. Saint Guily et Lamy [1988]
avaient interprété les oscillations allant de la bande inertielle
à 4 jours en terme d'ondes de Rossby topographiques piégées
sur le plateau des Kerguelen. L'observation de la pression atmosphérique
aux stations côtières nous a permis [Yoon, 1997] d'interpréter
en terme d'effet de baromètre inverse les pics d'énergie
dans tous les signaux analysés dans la bande de 10 à 60 jours.
Lorsque les séries sont filtrées à 60 jours, les signaux
résiduels sont dominés par des oscillations dont les périodes
se situent entre 120 et 180 jours. Park et Saint Guily [1992] ont
interprété les oscillations identifiées dans les données
de Géosat dans la bande 2 à 4 mois en terme d'ondes de Rossby
semi-annuelles advectées par le CCA. Cette interprétation
a été confortée par Hugues [1995] sur la base
des résultats de la simulation du CCA dans le cadre de FRAM. Cette
contribution des ondes de Rossby doit être mieux comprise afin de
l'éliminer des observations et accéder à la variabilité
saisonnière à interannuelle du transport dans le CCA.
7.7.4.4 Observation des variations
séculaires du niveau de la mer
A léchelle globale planétaire,
lélévation moyenne du niveau de la mer est actuellement
de lordre 1 ou 2 mm/an, estimation basée sur lanalyse des observations
marégraphiques archivées depuis plus dun siècle.
En relation avec le réchauffement attendu de notre planète
par effet de serre, un scénario raisonnable conduit à prédire
une élévation moyenne du niveau des océans de lordre
de 50 cm au cours du prochain siècle [Warrick et al., 1996].
Si lon se fixe comme objectif de détecter cette tendance sur les
10 années qui viennent avec une incertitude de 10%, le problème
posé est donc de détecter une élévation globale
de 5 cm avec une déviation standard de 5 mm sur ces 10 ans. Si lon
retient comme variabilité typique interannuelle du niveau de la
mer un signal de lordre de 50 mm avec une pseudo périodicité
de 5 ans, les contraintes posées ci-dessus conduisent donc à
conclure quil faut disposer denregistrements de haute qualité
en 50 stations indépendantes, à léchelle planétaire.
Doù le programme GLOSS, dont lobjectif est la constitution et
la maintenance dun réseau de stations de mesure du niveau de la
mer décorrélées, et réalisant des mesures continues
contrôlées avec précision. Les quatre stations françaises
de ROSAME font partie de ce réseau. Comme les déformations
géodynamiques des socles sur lesquels les appareils sont installés
introduisent dans le signal observé une composante étrangère
au problème, il est nécessaire de connaître les mouvements
verticaux de ces socles, et donc de les mesurer avec une précision
compatible avec celle évoquée ci-dessus. Une étude
a été réalisée à lIGN pour évaluer
les possibilités offertes par le système GPS pour localiser
ces stations marégraphiques dans le repère ITRF, par rapport
au centre de la terre, afin de suivre le déplacement vertical de
ces stations sur le long terme. Au cours de la campagne NIVMER94, des repères
géodésiques ont été posés autour des
trois stations de Crozet, Kerguelen et Saint-Paul, ainsi que des piliers
GPS à Crozet et Kerguelen, rattachés chacun par nivellement
aux repères géodésiques. Deux campagnes GPS ont été
réalisées à Kerguelen en 1994 et 1995, ainsi quun
rattachement des mesures du niveau de la mer de KER-ARGOS au système
de repère géodésiques qui entourent la station [Wöppelman,
1997]. Nous avons étudié plus récemment au LEGOS lévolution
comparée du niveau de la mer enregistré par marégraphes,
de celui observé par le satellite T/P, et du mouvement vertical
du socle terrestre des sites, via le système DORIS. Limpact de
la variation verticale de la croûte terrestre sur lévolution
locale du niveau de la mer a été démontré en
de nombreux points du réseau GLOSS-Alt [Cazenave et al.,
1999].
7.7.5 Moyens de mesures mis en uvre
7.7.5.1 Le réseau
Les quatre stations marégraphiques
côtières sont chacune équipées de deux modules
: un module côtier, et un module immergé sur le rebord du
plateau continental proche. Le maintien technique et logistique de ce réseau
est fait depuis la France par le LEGOS et la Division Technique de lINSU
à Brest, complété dune mission océanographique
sur le terrain tous les ans. Pour de plus amples informations techniques
nous laissons le lecteur se reporter aux derniers rapports de mission [Lefèvre,
1999; Lefèvre, 2000].
7.7.5.2 Stations marégraphiques
côtières
Le module côtier est composé
dun capteur de pression et de température immergé dans un
puits de tranquilisation, dun câble de liaison et dalimentation
en énergie, et dune centrale à terre. La centrale est composée
dun module de communication avec le capteur immergé, dun capteur
de pression atmosphérique, et dun module de gestion et archivage
des mesures, avec transmission par ARGOS. Les stations de Kerguelen et
St Paul ont été conçues et produites par la société
CLS-ARGOS. Les stations plus récentes de Crozet et Dumont d'Urville
ont été adaptées des précédentes et
produites par la société MORS.

Figure 29 : Capteur de pression hors
de son puits marégraphique (Kerguelen, photo de lauteur, campagne
OISO3-Nivmer98)

Figure 30 : Centrale CLS-ARGOS dacquisition
et de transmission des données marégraphiques (Kerguelen,
photo de lauteur, campagne OISO3-Nivmer98)

Figure 31 : Antenne Argos et puits
marégraphique en contrebas (Crozet, photo de lauteur, campagne
OISO3-Nivmer98)
Ce module offre l'avantage d'une acquisition
transmise en temps réel, par satellite. Il est de plus rattaché
géodésiquement par un ensemble de repaires fixes et reliés
à l'aide des techniques GPS et DORIS au centre de masse de la terre,
dans le système ITRF. Il comporte enfin un capteur de pression atmosphérique
local qui permet de corriger les mesures de pression de fond en soustrayant
la pression atmosphérique. Pour accéder à la hauteur
de la colonne en place au-dessus du capteur, un calcul simple faisant intervenir
les différents paramètres mesurés est effectuer. La
Figure 32 présente le principe dacquisition des mesures et leur
transmission. Le seul inconvénient de ces stations est que, située
à la côte, la mesure que le capteur fait est contaminée
par des effets locaux qui peuvent être gênants.
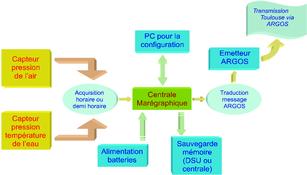
Figure 32 : Principe des mesures des
stations du réseau ROSAME
Actuellement, ces stations ne sont pas
équipées de capteur de salinité. C'est certainement
la première amélioration à introduire afin d'augmenter
la précision de la conversion de la pression en niveau de la mer.
Le site de Kerguelen, nous l'avons mentionné plus haut, est un des
sites de référence pour le monitoring à long terme
de la calibration des altimètres satellitaires. La continuité
des enregistrements doit donc être assurée sans faille: une
deuxième station d'observation devra donc être installée
sur ce site, dès que possible afin de parer à tout incident
sur la station existante. Par ailleurs, l'établissement des bases
de référence géodésique de ces stations n'est
pas achevé. En outre, les géophysiciens et géodésiens
recommandent aussi deffectuer des mesures absolues de ka pesanteur en
collocation avec les marégraphes (Francis, communication
personnelle, 2000).
7.7.5.3 Stations marégraphiques
pélagiques
Dans la mesure du possible, chaque module
côtier est couplé à un module immergé sur le
plateau. Ce module est une station autonome supportant un capteur de pression
et température. Son autonomie nominale est de 4 ans, mais pour des
raisons de sécurité ces stations sont relevées avec
un rythme annuel. Les missions océanographiques NIVMER permettent
un relevage régulier des mouillages qui sont remplacées dans
la foulée par un autre mouillage.

Figure 33 : Marégraphe pélagique
de Amsterdam sur sa cage avec largueurs et lest sans flottabilité
avant mise a leau (photo de Nicolas Metzl, campagne OISO4-Nivmer99)

Figure 34 : Récupération
du mouillage pélagique de Amsterdam (photo de Nicolas Metzl, campagne
OISO4-Nivmer99)
Il présente l'avantage d'être
déployé sur le rebord du plateau continental, affranchi (non
totalement) des effets côtiers. Mais il présente deux inconvénients.
La référence de niveau est perdue à chaque relevage
de la station, et la pression atmosphérique locale, nécessaire
pour convertir la mesure de pression en niveau de la surface libre de la
mer, doit être déduite de celle mesurée à terre,
avec une combinaison éventuelle d'informations venant des analyses
des modèles de prévision météorologiques.
7.7.6 Mesures des stations marégraphiques
de ROSAME
7.7.6.1 Traitement des données
Dans ce paragraphe nous allons nous intéresser
plus particulièrement aux 4 marégraphes côtiers de
ROSAME afin de donner un aperçu physique des mesures de terrain.
Comme nous lavons vu dans le paragraphe 7.7.5, les données mesurées
sont directement envoyées au LEGOS (UMR5566) à Toulouse par
liaison Argos pour être traitées. Des données horaires
sont transmises : pression atmosphérique Patm
au sommet du puits marégraphique, pression hydrostatique Pfondau
fond du puits marégraphique et température de leau  .
P.
Téchiné du LEGOS traite ces données en temps quasi
réel au moyen dalgorithmes spécifiques. Les données
en élévation (colonne deau) sont obtenues en calculant la
différence entre la pression de fond et la pression atmosphérique,
corrigée par la densité
.
P.
Téchiné du LEGOS traite ces données en temps quasi
réel au moyen dalgorithmes spécifiques. Les données
en élévation (colonne deau) sont obtenues en calculant la
différence entre la pression de fond et la pression atmosphérique,
corrigée par la densité  de
leau de mer. Cette densité est fonction de la température
de
leau de mer. Cette densité est fonction de la température  de
leau (qui est mesurée) et de la densité
de
leau (qui est mesurée) et de la densité  de
leau (qui est prise constante à 35 g.l1). Une relation
polynomiale permet dobtenir
de
leau (qui est prise constante à 35 g.l1). Une relation
polynomiale permet dobtenir  :
:
 (7.65)
(7.65)
avec :
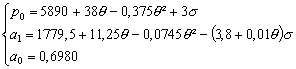 (7.66)
(7.66)
Nous déduisons la hauteur deau
H
par la relation :
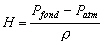 (7.67)
(7.67)
A titre dillustration nous donnons Figure
35 les mesures horaires effectuées durant le mois de mai 2000 par
le marégraphe côtier de Kerguelen. Le tracé de la hauteur
de la colonne deau pour le mois de mai est donnée à la troisième
rangée de la figure. Nous pouvons noter dans le signal de hauteur
deau que nous retrouvons bien deux marées basses et deux marées
par jour (environ) ce qui souligne bien lexistence prépondérante
de londe M2 dans le spectre de marée. Ainsi les
marées sur les côtes de larchipel des Kerguelen sont de type
semi-diurnes comme sur les côtes bretonnes françaises. En
outre le battement bimensuel entre londe M2 et londe
S2
est bien visible (cest en fait lenveloppe du signal de marée).
Nous pouvons aussi remarquer que tous les jours les deux marées
hautes ne sont pas tout à fait identiques du fait de la déclinaison
luni-solaire, ce que nous retrouvons dans londe
K1.
Figure 35 : Mesures du marégraphe
KER-Argos durant le mois de mai 2000
7.7.6.2 Spectre de marée à
Kerguelen
Des variations mesurées puis corrigées
de ce signal, nous en faisons lanalyse harmonique afin dobtenir les composantes
du spectre de marée. Dans notre cas, nous cherchons un spectre dune
cinquantaine dondes. Le choix de ces ondes est fait en fonction dun critère
dimportance dans le spectre. En effet, chacune représente plus
de 1 cm délévation maximale, ce qui nous permet davoir
des ondes hors du bruit instrumental. Le spectre obtenu (cf. Figure 36)
montre bien la séparation des ondes en groupe, plus particulièrement
le groupe des semi-diurnes, des diurnes et des longues périodes.
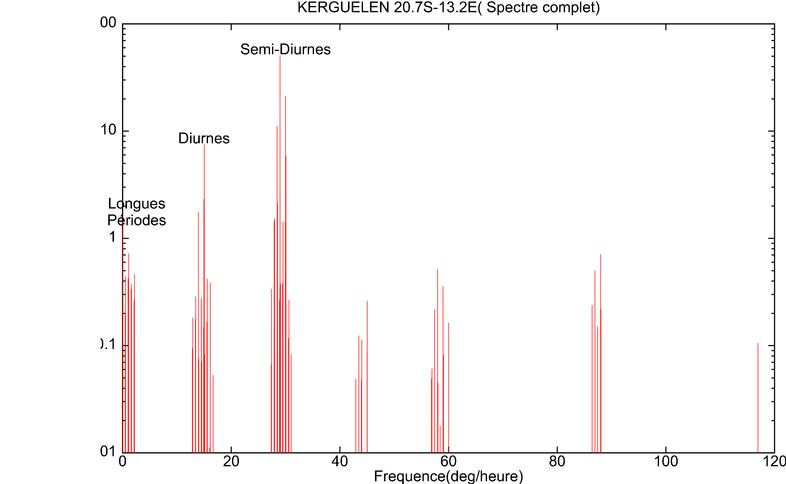
Figure 36 : Spectre de marée
calculé à Kerguelen (amplitude en cm)
Il faut noter que les ondes non-linéaires
tiers-diurnes, quart-diurnes, sixième-diurnes
ne sont pas à
négliger. Leur importance dans le spectre est nette : la complexité
de la géométrie des petits fonds génère des
non-linéarités. Des zooms plus précis [Ponchaut
et al., 1999] sur les trois principaux groupes permettent daffiner
les ondes présentes dans le spectre global.
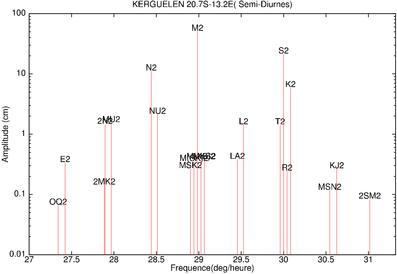
Figure 37 : Zoom du spectre de marée
à Kerguelen pour les ondes semi-diurnes
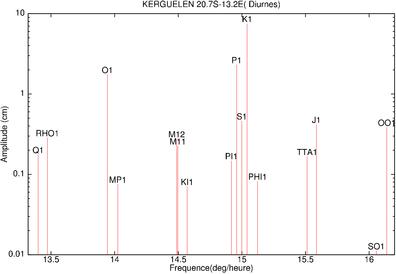
Figure 38 : Zoom du spectre de marée
à Kerguelen pour les ondes diurnes
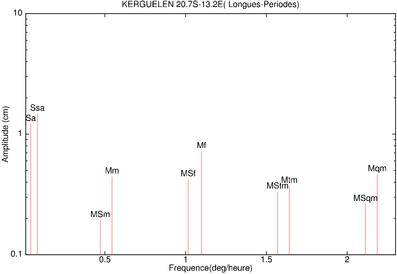
Figure 39 : Zoom du spectre de marée
à Kerguelen pour les ondes longues périodes
7.7.6.3 Reconstruction du signal
de marée : la prédiction
Afin de montrer la robustesse de lanalyse
harmonique, nous avons tracé (Figure 40) pour le mois de mai 2000
la marée déduite de lanalyse harmonique des mesures de novembre
1994 à avril 2000 (courbe noire) et la marée déduite
des mesures grâce à un filtre de Demerliac (courbe
rouge). Les deux signaux sont très semblables. Le filtre de Demerliac
est un filtre numérique passe-bas qui élimine les composantes
cycliques de courte période du signal marégraphique, en particulier
les composantes diurnes et semi-diurnes de la marée afin dobtenir
des moyennes filtrées journalières [Wöppelman,
1997]. En soustrayant le signal délévation mesurée
du niveau de la mer et le signal filtré, on obtient la courbe de
marée (courbe rouge). La mesure sur une longue durée permet
donc dobtenir le spectre de marée qui donne accès à
une prédiction ultérieure précise (courbe noire).
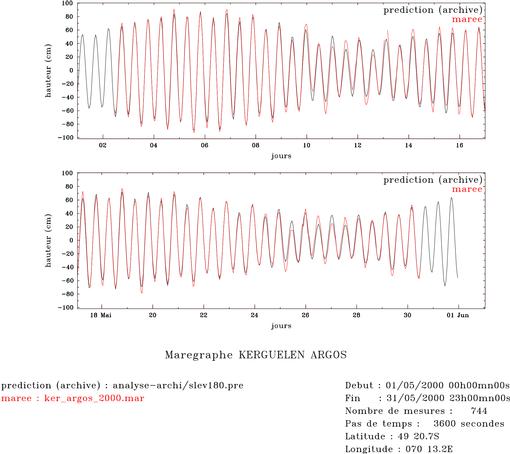
Figure 40 : Comparaison de la prédiction
et la mesure avec le marégraphe KER-Argos
7.7.6.4 Spectre de marée pour
les marégraphes côtiers de ROSAME
Les différents travaux présentés
ci-dessus permettent donc dobtenir les valeurs en amplitude et en phase
des composantes du spectre de marée pour les marégraphes
côtiers de ROSAME. Etant donnée la singularité des
données apportées par ces marégraphes du fait des
terres hostiles et lointaines où ils sont implantés, il nous
a paru intéressant dindiquer les dix plus importantes de ces composantes
(cf. tableaux ci-dessous).
|
Onde
|
Amplitude (cm)
|
Phase (degrés)
|
|
M2
|
13,1555
|
161,20
|
|
K1
|
4,0965
|
154,42
|
|
S2
|
3,9492
|
195,38
|
|
Mf
|
3,7369
|
201,83
|
|
N2
|
3,0768
|
142,18
|
|
Mm
|
2,9440
|
223,32
|
|
Mtm
|
2,8925
|
206,58
|
|
O1
|
2,4237
|
301,64
|
|
Mqm
|
1,8588
|
244,45
|
|
K2
|
1,2695
|
188,39
|
Tableau 9 : Composantes de la marée à lîle
de Crozet
|
Onde
|
Amplitude (cm)
|
Phase (degrés)
|
|
M2
|
50,8216
|
190,45
|
|
S2
|
21,3388
|
230,86
|
|
N2
|
11,1385
|
172,42
|
|
K1
|
7,5242
|
152,20
|
|
K2
|
5,9062
|
227,90
|
|
P1
|
2,3189
|
149,78
|
|
n2
|
2,1312
|
174,81
|
|
O1
|
1,7474
|
114,77
|
|
m2
|
1,5467
|
155,14
|
|
Ssa
|
1,4781
|
206,41
|
Tableau 10 : Composantes de la marée à Kerguelen
|
Onde
|
Amplitude (cm)
|
Phase (degrés)
|
|
M2
|
39,5538
|
230,65
|
|
S2
|
21,2250
|
274,33
|
|
N2
|
7,2217
|
213,98
|
|
K1
|
6,8536
|
153,15
|
|
K2
|
5,9235
|
272,29
|
|
O1
|
3,2232
|
175,52
|
|
Sa
|
2,3580
|
336,42
|
|
P1
|
2,0951
|
150,90
|
|
n2
|
1,3843
|
213,80
|
|
L2
|
1,3489
|
245,80
|
Tableau 11 : Composantes de la marée à lîle
de St Paul
|
Onde
|
Amplitude (cm)
|
Phase (degrés)
|
|
O1
|
31,4270
|
207,71
|
|
K1
|
29,3746
|
226,66
|
|
M2
|
27,3683
|
61,52
|
|
S2
|
15,1844
|
99,93
|
|
P1
|
8,8126
|
215,11
|
|
N2
|
7,3380
|
40,65
|
|
Q1
|
7,0867
|
203,30
|
|
K2
|
4,6430
|
105,33
|
|
Mf
|
3,9188
|
264,37
|
|
Msm
|
2,5240
|
201,27
|
Tableau 12 : Composantes de la marée à Dumont
dUrville
Les données de Crozet dont sont
déduites les composantes de marée sétalent de décembre
1994 à avril 2000 avec dimportantes discontinuit�s dues
à des tempêtes, des problèmes techniques, le rude climat
de lîle
. Celles du marégraphe de Kerguelen séchelonnent
de novembre 1993 à avril 2000 sans discontinuité autre que
celles occasionnelles de maintenance. Celles du marégraphe de St
Paul vont doctobre 1994 à avril 2000 avec un trou de 6 mois en
1999 dû à un problème dalimentation. Celles du marégraphe
de Dumont dUrville s'étendent de février 1999 à janvier
2000 sans discontinuité. Dans la mesure du possible les interventions
des missions NIVMER assurent la continuité temporelle des mesures,
mais les difficultés technologiques et lhostilité des Terres
Australes rendent la tache difficile.
Ces données sont très intéressantes
scientifiquement. Outre les applications quelles ont dans les différents
programmes présentés dans le paragraphe 7.7.4, elles nous
renseignent sur la physique de la marée autour des différentes
zones océaniques où elles sont localisées. Ainsi,
les marées sont importantes à Kerguelen (amplification sur
le plateau de larchipel), assez importantes à St Paul (configuration
du cratère) et Dumont dUrville (dans une baie), mais faibles à
Crozet (appareil orienté vers le plein océan). Le type de
marée est fortement semi-diurne à Kerguelen et St Paul, à
majorité semi-diurne à Crozet et, phénomène
plus rare à la surface des océans, diurne à Dumont
dUrville. Toutes ces données sont traitées en temps quasi-réel
à Toulouse et sont envoyées au Fast Delivery Center du Sea
Level Center de luniversité de Hawaii (http://www.soest.hawaii.edu/UHSLC)
puis au BODC (British Oceanographic Data Center : http://www.pol.ac.uk/bodc/bodcmain.html)
du Royaume-Uni où elles sont accessibles en ligne sur Internet.
Dans notre cas plus spécifique de la modélisation des marées
à léchelle globale, nous allons voir que ce type de données
est très utile, tout autant pour faire des comparaisons de modèles
et de mesures de terrain, que pour améliorer nos modèles
en assimilant ces données (cf. Chapitre 9 et Chapitre 10). Ainsi,
les 4 marégraphes de ROSAME nous sont extrêmement précieux
du fait de leurs emplacements isolés et de la bonne qualité
des mesures quils fournissent.
Back |
Next
Title: Thèse de Fabien Lefèvre
Issue: Version 1.0
Date: 29/09/2000